이번 챕터에서는 다변수함수에서 유용하게 써먹을 수 있는, 혹은 복소수 개념에서 써먹을 수 있는 복소평면(Complex plane) 개념과 이것을 일반화시킨 극좌표계(Polar coordinate)에 대해서 살펴보도록 하자.
(Complex Plane(복소평면))
복소수 z=a+bi 를 벡터 z=(a,b)로 표현하는 방식으로, 마치 벡터처럼 2차원 평면(복소평면)에 표시하는 방식이다.
여기서 생각할 수 있는 질문들을 잠깐만 짚고 넘어가면
1. 복소수를 벡터로 표현해도 되는가?
2. 복소수를 벡터로 표현하면 뭐가 좋을까?
1. 선형대수적으로 생각해보면, 복소수를 벡터로 표현하는 것은 아무 문제가 없다. 실수축(1)과 허수축(i)을 각각의 basis로 보면 서로 orthogonal한 basis를 이루므로(실수부분과 허수부분은 서로 영향을 주지 못한다.) 2차원 벡터로 표현해도 전혀 상관이 없다. (선형대수를 몰라서 이해를 못해도 상관없다. 그냥 복소수를 2차원 평면에 표시할 수 있다는 사실만 알아도 된다.)
2. 복소수를 벡터로 표현하면, 보고 직관적으로 알아챌 수 있기 때문에 이해하는데 아주 효과적이다. 또한, 극좌표계와 연관되어 복소수 곱셈, 나눗셈을 쉽게 표현할 수 있다.

(Polar Coordinate System(극좌표계))
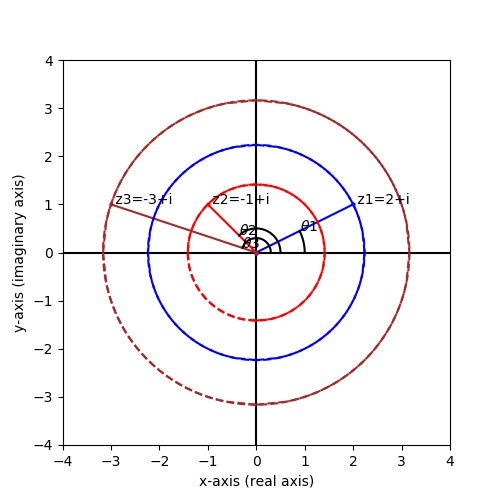
2차원 평면을 원점과의 거리(r), x축과의 각도(theta)로 표현한 좌표계이다.
예를 들어서 위의 그림에서 z1=(2,1)이라고 한다면, 이 z1을 극좌표계로 표현하면 r1=sqrt(5), theta1=atan(1/2)가 될 것이다.
일반 직교좌표계에서 극좌표계로 바꾸는 변환(Transformation)(혹은 사상(mapping))은 다음과 같이 생각할 수 있다.

이 때, 저 theta를 잡는 건 상황마다 다를 수 있다. (-pi~pi일수도...)
이제, 복소평면과 극좌표계 사이의 관계에 대해서 알아볼 것이다.
테일러 급수 파트에서 우리는 다음과 같은 식을 보았다.
여기서 저 교대로 바뀌는 부호를 잘 처리하면 뭔가 저 3개의 식을 하나로 묶을 수 있을 것 같다.
이를 조금 더 자세히 보면,
아직까지도 극좌표계와 관련이 잘 안 보이면

위에서 보았던 직교좌표계를 극좌표계로 변환할 때 보았던 식들이 나온다.
정확히 지금 한 건, 극좌표계(r,theta)를 직교좌표계(x,y)로 변환하는 과정이다.
위의 내용을 싹 다 정리하면 복소수 z=x+yi를 다음과 같이 표현할 수 있다.
예를 들어,

로 표현할 수 있는 것이다.
이러한 표현방식은 특히, 복소수의 곱셈이나 나눗셈을 이해하기 아주 좋다.
혹시, 수능준비를 하면서

등의 표현을 많이 보지 않았는가?
이를 극좌표계로 바꿔서 생각해보면,

이 되므로, 쉽게 복소수의 곱셈을 계산할 수 있다. 즉,

특히, 각도가 합으로 표현되므로 시각화에 아주 유용하다. (z3=z1z2)
또한, 이런 생각도 가능하다. (여기서 C는 Complex plane을 말하고, z가 복소수(complex number)임을 말한다.)

자, 여기까지 복소수를 복소평면 위의 벡터로, 또, 극좌표계로 표현하는 방법을 알아보았다.
다음 챕터에서는 다른 좌표계에 대한 간단한 설명을 끝으로 좌표계 이야기를 마무리하도록 하겠다.
(P.S) 내용이 너무 길어진 감이 있어 생략했지만 Euler Formula를 소개하고 끝낸다.




