PID Controller 섹션에서
Lead/Lag Compensator에 대한 이야기를 잠시 했었는데, 마치 PD, PI Controller의 역할을 한다고 하였다. (게다가, PD Controller는 NON-Causal system이다!)
그러면, 왜 이런 Lead/Lag라는 이름이 붙었는지 살펴보자.
(Lead Compensator)
-> PD Controller의 역할!

Lead Compensator의 Bode Plot을 그려보면서, 성질을 알아보자.


1. LOW-Frequency (<0.1=z)
=> Magnitude와 Phase는 그대로 보존!
2. Medium-Frequency (z=0.1<...<p=10)
=> Phase Margin을 높인다!!!
=> 안정성 UP
얼마나 Phase Margin을 높일 수 있는지 계산해보면...


즉, alpha가 작을수록 더 큰 Phase Margin을 얻을 수 있다.
물론, 너무 크면, High-Frequency에 영향을 준다.
3. High-Frequency (>10=p)
=> Phase는 보존, 그러나 Magnitude가 커진다!! (1/alpha만큼)
=> Transient Response에 빠른 반응!
=> 그러나, 고주파수 영역의 Noise를 키울 가능성이 있다!
그러므로, alpha를 잘 조절해서, PM과 High-Frequency Noise 사이의 성능을 조절해야 한다.
(Lag Compensator)
-> PI Controller의 역할!

이번에도 Lag Compensator의 Bode Plot을 그려보면서, 성능을 확인해보자.

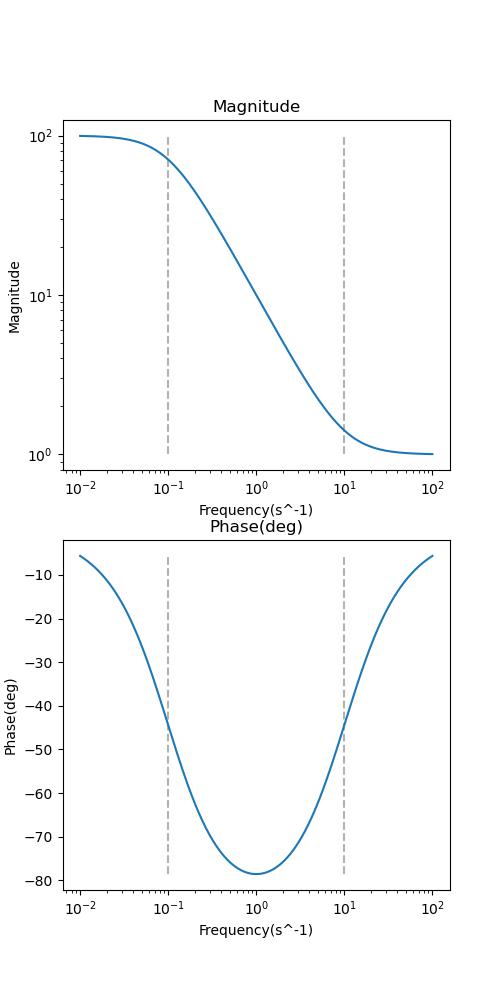
1. Low-Frequency
=> s=0으로 갈수록, Magnitude가 크다(Inf)! -> Steady-State Error를 제거할 수 있다!!
2. Medium-Frequency
=> Phase Margin이 줄어든다.... (불안정성 UP) (PI Controller를 달면, 진동이 커졌던 것을 생각해보자)
3. High-Frequency
=> Phase, Magnitude가 보존된다...
여기서는 Compensator만 따로 떼어놓고 보았지만, 실제 시스템과 붙여서 사용할 때는...
Phase Margin이 줄어드는 것이 문제이니, Gain<1인 부분의 Frequency가 Medium Frequency에 되도록이면 걸리도록 설계하면 될 것이다!
즉, Crossover Frequency에 저 Medium Frequency가 걸리지 않도록 하는 것이 좋을 것이다!
그러면, 꼭 Lead/Lag Compensator를 구분해서 써야하는 것인가???
그건 아니다. Lead, Lag Compensator를 붙여서 쓸 수도 있다!
Example)

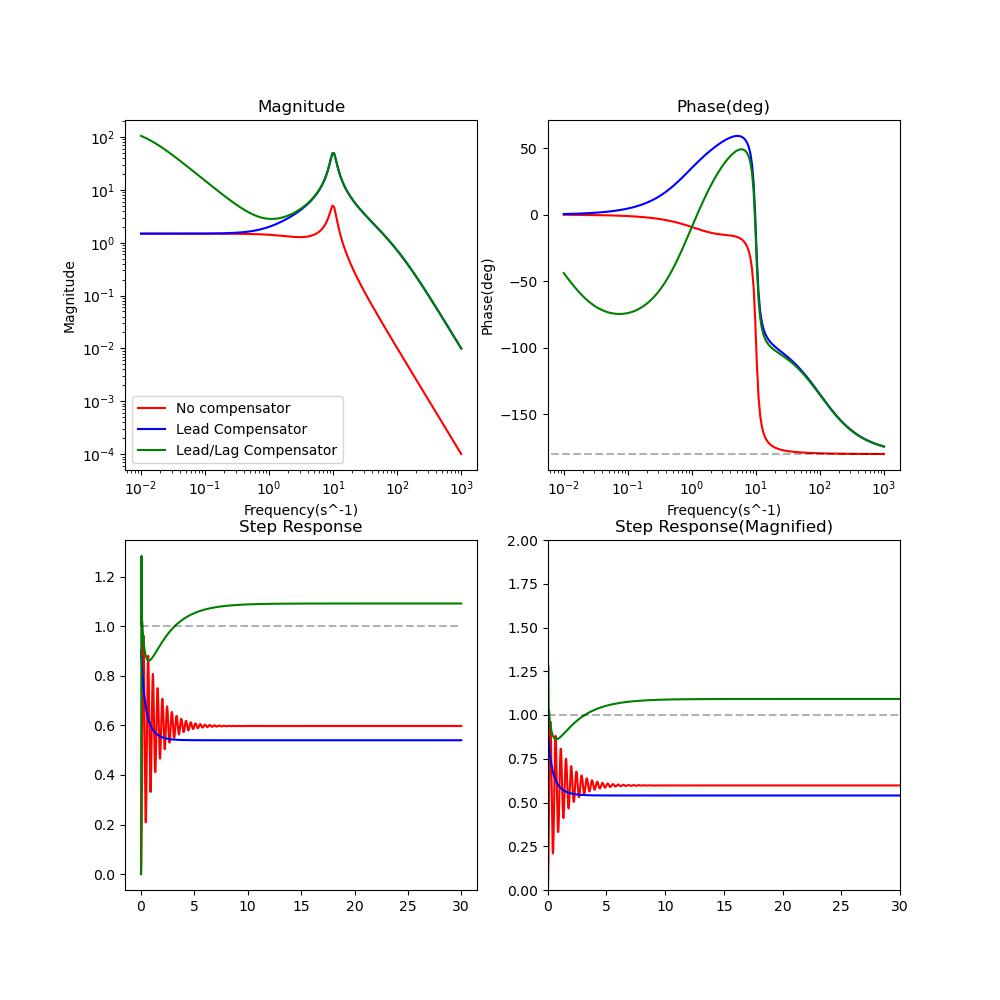
먼저, Transient Response 성능 향상을 위해 Lead Compensator를 붙여주자.
주파수가 10~에서 Phase Margin이 급격히 떨어진다! -> 이부분의 Phase Margin을 조금 높인다!
-Lead Compensator

그런데, 이 Lead Compensator를 붙이면, Response에서 보는 것처럼, Steady-state Error가 생긴다!
이를 해결하기 위해서 Lag Compensator도 붙이자. 이 때, 서로 영향이 없게 해야 Phase Margin의 문제가 생기지 않는다.
(물론, 여기서 Phase Margin이 저주파수에서는 넉넉하다.)
-Lag Compensator

그러나, 이 Lag Compensator를 붙여도, Steady-State Error가 잡히긴 하지만, 만족스럽지는 않다...
(사실, 전에 올려놓은 코드를 (0.001) 이하의 주파수에서 사용하기 위해선 꽤나 복잡해지므로 (Singularity 문제가 생긴다) 일단 이정도로 한다. lag compensator가 영향을 주는 주파수 영역이 더 저주파수로 가면, 초반에 피크는 생기지만, Steady-State Error를 더 잘 제거할 수 있다.)
어쨌든간에 이런식으로 Compensator를 붙여서 성능을 조절할 수 있다!!
정리하면...
=> Lead Compensator: PM 증가, High-Frequency Noise 증가
-Bode Plot에서
1. Magnitude => High-Frequency에서의 크기가 커진다!
2. Phase => 주어진 주파수 영역에서의 Phase가 커진다!
=> Lag Compensator: PM 감소, Steady-State Error 제거
-Bode Plot에서
1. Magnitude => Low-Frequency에서의 크기가 커진다!
2. Phase => 주어진 주파수 영역에서의 Phase가 작아진다!
또한, 공통적으로 alpha를 통해 영향을 받는 주파수영역의 크기를 조절, T를 통해 어느 영역의 주파수를 영향 줄 지 결정
=> Bode Plot에서
1. Low-Frequency의 Magnitude는 큰 것이 좋다! (Steady-State Error 제거)
2. High-Frequency의 Magnitude는 작은 것이 좋다! (Noise 제거)
3. 주어진 주파수 영역의 Phase Margin은 되도록이면 크게!
'제어이론 > 선형시스템 -> LTI System' 카테고리의 다른 글
| (선형시스템) 8-2. Controllability and Observability (1) | 2023.05.18 |
|---|---|
| (선형시스템) 8-1. Intro. of Full-State Feedback Control (0) | 2023.05.17 |
| (선형시스템) 7-3. Stability in Frequency-Domain -> Nyquist Plot (1) | 2023.04.24 |
| (선형시스템) 7-2. 시스템이 얼마나 안정한가? (Gain Margin, Phase Margin) (0) | 2023.04.24 |
| (선형시스템) 7-1. Bode Plot (0) | 2023.04.21 |



