우리가 앞 챕터에서 다룬 Closed-loop System의 Tracking 문제와 Regulation 문제를 더 살펴보자.
1. Tracking Problem => NO W, V, only R(Reference Input)


사실, 이것은 보다 일반적으로 다음과 같이 생각할 수도 있다.

즉, (G_open은 R에서 Y까지 -> GK) , (G_loop는 loop안에서 -> GKH)
그러면, 저 Error가 항상 0으로 움직여 주는지 살펴보자...
이 때, t가 무한대로 갔을 때의 Error를 Steady-state Error라고 부른다!

그런데, Final Value를 구하는 방법을 적용해보면...

임을 알고 있다!
그러면 이를 통해서 Steady-State Error를 구할 수 있다.
Steady-State Error가
a. Step Input을 넣었을 때 0이 아니면-> Type 0 system
b. Ramp Input을 넣었을 때 0이 아니면 -> Type 1 system
c. Parabola Input을 넣었을 때 0이 아니면-> Type 2 system
저 Input들은 각각 다음과 같다.

여기서 어차피 steady-state error가 0으로 가는지 안 가는지가 중요하므로, 계수는 System의 Type을 결정하는데 상관없다.
예를 들어보자. (위의 예에서 Sensor Dynamic이 빠졌다고 생각해보자.)

즉, GK의 Pole이 원점에 많이 있으면 복잡한 Input에 대해서 Steady-State Error를 줄여버릴 수 있다!!
왜인지 잠시 생각해보면...
-> s=0(freq=0)이 결국 Steady-State Error에 영향!
-> s=0에 Pole이 있어야지 Error가 0으로 갈 것임! (by 전달함수)
-> 그런데, Input으로 저 Pole이 상쇄되기 때문에, Input이 s^(-k)이면, pole도 그만큼 필요!
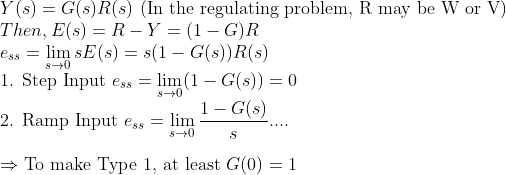
2. Regulation Problem
이 경우에도 Tracking Problem과 똑같이 생각할 수 있다.
여기선 조금 더 나아가서 Closed-loop System의 전달함수 자체를 보자...
또한, Type 1 system (ramp input)의 경우 로피탈의 정리를 이용해서, 조금 더 정리해보면

-> 즉, (전체) 전달함수의 zero와 pole로 Steady-State Error를 표현할 수 있다.
'제어이론 > 선형시스템 -> LTI System' 카테고리의 다른 글
| (선형시스템) 6-2. PID Controller (0) | 2023.04.17 |
|---|---|
| (선형시스템) 6-1. Root Locus -> 안정성 with Manipulation (0) | 2023.04.12 |
| (선형시스템) 5-2. 어떻게 원하는 output을 얻을 수 있을까? (Tracking, Regulation Problem) (0) | 2023.04.11 |
| (선형시스템) 5-1. Closed-loop system의 소개 (0) | 2023.04.11 |
| (선형시스템) 4-2. Zero는 어디에 쓰는가? (0) | 2023.04.10 |



